Li 等人提出了基于最小信息损失和直方图分布先验的水下图像增强算法。该算法提出了基于水下物理成像模型和最小信息损失原则的水下图像去雾模块,以恢复水下图像的灰度和颜色信息。同时,该算法还提出了基于直方图分布先验的对比度增强模块,可增加水下图像的对比度和亮度[11]。Peng等人提出了基于雾现象与光吸收现象的水下图像增强算法,他们认为基于暗通道先验和最大强度先验算法估计深度图的方式经常因为水下图像中的光照条件而失效,导致参数估计不准确以及增强效果不佳。因此,该算法提出了基于水下图像雾现象和光吸收现象的深度图估计模块,可以更准确地估计水下图像的深度图信息,并将该深度图信息引入水下物理成像模型,用于增强水下图像[12]。Akkaynak等人通过海洋实地勘探,对水下物理成像模型进行了修正。随后,他们通过测量水下场景的水平深度、估计衰减系数,并基于修正的水下物理成像模型对水下图像进行增强[13]。Berman 等人提出了基于模糊线的水下图像增强算法。该算法研究了不同水质类型的光谱特性,仅通过估计水下图像的蓝色通道和绿色通道的衰减率,就可将水下图像增强简化为图像去雾问题[14]。
本章涉及的针对图像质量评价算法的性能评价指标主要有:皮尔逊线性相关系数(Pearson Linear Correlation Coefficient,PLCC)、斯皮尔曼等级相关系数(Spearman Rank Order Correlation Coefficient,SROCC)、肯德尔等级相关系数(Kendall Rank Order Correlation Coefficient,KROCC)、均方根误差(Root Mean Square Error,RMSE)、感知权重排序相关度(Perceptually Weighted Rank Correlation,PWRC)。这些指标被用于在绝大多数实验中衡量图像质量评价算法的性能。
[1] IQBAL K, SALAM R A, OSMAN A, et al. Underwater image enhancement using an integrated colour model[J]. IAENG International Journal of Computer Science, 2007, 34(2): 1-8.
[2] FU X, FAN Z, LING M, et al. Two-step approach for single underwater image enhancement[C]// Proceedings of 2017 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS). NJ: IEEE, 2017: 789-794.
[3] ANCUTI C, ANCUTI C O, HABER T, et al. Enhancing underwater images and videos by fusion[C]// Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) . [S. l.]: [s. n.], June 2012: 81-88.
[4] ANCUTI C O, ANCUTI C, DE VLEESCHOUWER C, et al. Color balance and fusion for underwater image enhancement[J]. IEEE Transactions on Image Processing. NJ: IEEE, 2017, 27(1): 379-393.
[5] HITAM M S, AWALLUDIN E A, YUSSOF W N J H W, et al. Mixture contrast limited adaptive histogram equalization for underwater image enhancement[C]// Proceedings of 2013 International Conference on Computer Applications Technology (ICCAT). [s. l.]: [s. n.], 2013: 1-5.
[6] FU X, ZHUANG P, HUANG Y, et al. A retinex-based enhancing approach for single underwater image[C]// Proceedings of 2014 IEEE International Conference on Image Processing (ICIP). NJ: IEEE, 2014: 4572-4576.
[7] JAFFE J S. Computer modeling and the design of optimal underwater imaging systems[J]. IEEE Journal of Oceanic Engineering, 1990, 15(2): 101-111.
[8] DREWS P L J, NASCIMENTO E R, BOTELHO S S C, et al. Underwater depth estimation and image restoration based on single images[J]. IEEE Computer Graphics and Applications, 2016, 36(2): 24-35.
[9] CHIANG J Y, CHEN Y C. Underwater image enhancement by wavelength compensation and dehazing[J]. IEEE Transactions on Image Processing, 2011, 21(4): 1756-1769.
[10] GALDRAN A, PARDO D, PICÓN A, et al. Automatic red-channel underwater image restoration[J]. Journal of Visual Communication and Image Representation, 2015, 26: 132-145.
[11] LI C Y, GUO J C, CONG R M, et al. Underwater image enhancement by dehazing with minimum information loss and histogram distribution prior[J]. IEEE Transactions on Image Processing, 2016, 25(12): 5664-5677.
[12] PENG Y T, COSMAN P C. Underwater image restoration based on image blurriness and light absorption[J]. IEEE Transactions on Image Processing, 2017, 26(4): 1579-1594.
[13] AKKAYNAK D, TREIBITZ T. Sea-thru: a method for removing water from underwater images[C]// Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). NJ: IEEE, 2019: 1682-1691.
[14] BERMAN D, LEVY D, AVIDAN S, et al. Underwater single image color restoration using haze-lines and a new quantitative dataset[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(8): 2822-2837.
[15] WANG Y, ZHANG J, CAO Y, et al. A deep CNN method for underwater image enhancement[C]// Proceedings of 2017 IEEE International Conference on Image Processing (ICIP). NJ: IEEE, 2017: 1382-1386.
[16] LI C, ANWAR S, PORIKLI F. Underwater scene prior inspired deep underwater image and video enhancement[J]. Pattern Recognition, 2020, 98: 107038.
[17] DUDHANE A, HAMBARDE P, PATIL P, et al. Deep underwater image restoration and beyond[J]. IEEE Signal Processing Letters, 2020, 27: 675-679.
[18] WANG K, HU Y, CHEN J, et al. Underwater image restoration based on a parallel convolutional neural network[J]. Remote Sensing, 2019, 11(13): 1591.
[19] ZHOU Y, YAN K, LI X. Underwater image enhancement via physical-feedback adversarial transfer learning[J]. IEEE Journal of Oceanic Engineering, 2022, 47(1): 76-87.
[20] WANG K, SHEN L, LIN Y, et al. Joint iterative color correction and dehazing for underwater image enhancement[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5121-5128.
[21] LI C, GUO C, REN W, et al. An underwater image enhancement benchmark dataset and beyond[J]. IEEE Transactions on Image Processing, 2019, 29: 4376-4389.
[22] FABBRI C, ISLAM M J, SATTAR J. Enhancing underwater imagery using generative adversarial networks[C]// Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA). NJ: IEEE, 2018: 7159-7165.
[23] ISLAM M J, XIA Y, SATTAR J. Fast underwater image enhancement for improved visual perception[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3227-3234.
[24] LI C, GUO C, REN W, et al. An underwater image enhancement benchmark dataset and beyond[J]. IEEE Transactions on Image Processing, 2019, 29: 4376-4389.
[25] HU J, JIANG Q, CONG R, et al. Two-branch deep neural network for underwater image enhancement in HSV color space[J]. IEEE Signal Processing Letters, 2021, 28: 2152-2156.
[26] LI C, GUO J, GUO C. Emerging from water: underwater image color correction based on weakly supervised color transfer[J]. IEEE Signal Processing Letters, 2018, 25(3): 323-327.
[27] HE Y, BU X, JIANG M, et al. Low bit rate underwater video image compression and coding method based on wavelet decomposition[J]. China Communication, 2020, 17(9): 210-219.
[28] ZHANG Y, NEGAHDARIPOUR S, LI Q. Low bit-rate compression of underwater imagery based on adaptive hybrid wavelets and directional filter banks[J]. Signal Processing Image Communication, 2016, 47: 96-114.
[29] ZHANG Y, LI Q Z, NEGAHDARIPOUR S. Seafloor image compression using hybrid wavelets and directional filter banks[C]// Proceedings of MTS/IEEE OCEANS. NJ: IEEE, 2015: 1-9.
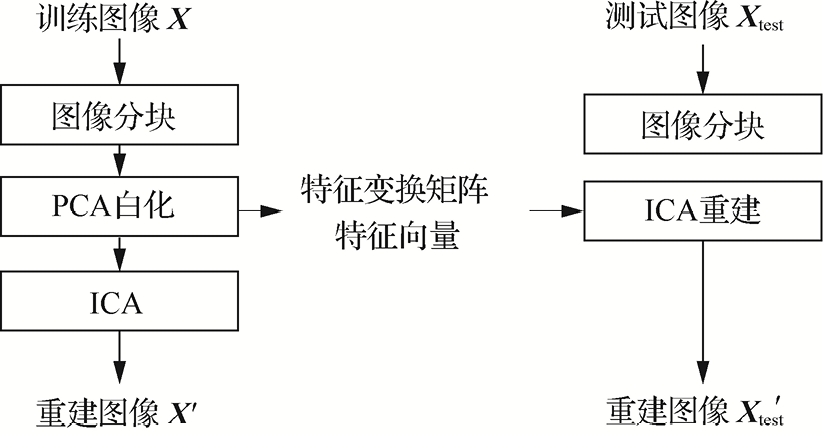
[30] WANG J, HE B, ZHANG S, et al. An efficient digital image compression scheme based on ICA for underwater color images[C]// Proceedings of MTS/IEEE OCEANS. NJ: IEEE, 2014: 1-4.
[31] MONIKA R, SAMIAPPAN D, KUMAR R. Underwater image compression using energy based adaptive block compressive sensing for IoUT applications[J]. Visual Computing, 2020(4).
[32] KRISHNARAJ N, ELHOSENY M, THENMOZHI M, et al. Deep learning model for real-time image compression in internet of underwater things (IoUT)[J]. Journal of Real-Time Image Processing, 2020, 12(4).
[33] ZHUANG M, LUO Y, DING X, et al. A robustness and low bit-rate image compression network for underwater acoustic communication[C]// Proceedings of International Conference on Neural Information Processing. [s. l.]: [s. n.], 2019:106-116.
[34] LIU J, YUAN F, XUE C, JIA Z, et al. An efficient and robust underwater image compression scheme based on autoencoder[J]. IEEE Journal of Oceanic Engineering, 2023:1-21.
[35] MONIKA R, SAMIAPPAN D, KUMAR R. Underwater image compression using energy based adaptive block compressive sensing for IoUT applications[J]. The Visual Computer. 2021, 37(4).
[36] MITTAL A, MOORTHY A K, BOVIK A C. No-reference image quality assessment in the spatial domain[J]. IEEE Transactions on Image Processin, 2012, 21(12): 4695-4708.
[37] PANETTA K, GAO C, AGAIAN S. No reference color image contrast and quality measures[J]. IEEE Transactions on Consumer Electronics, 2013, 59(3):643-651.
[38] WU Q, WANG L, NGAN K N, et al. Subjective and objective de-raining quality assessment towards authentic rain image[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2020, 99:1-1.
[39] YANG M, SOWMYA A, et al. An underwater color image quality evaluation metric[J]. IEEE Transactions on Image Processing, 2015, 24(12): 6062-6071.
[40] PANETTA K, GAO C, AGAIAN S. Human-visual-system-inspired underwater image quality measures[J]. IEEE Journal of Oceanic Engineering, 2016, 41(3):541-551.
[41] WANG Y, LI N, LI Z, et al. An imaging-inspired no-reference underwater color image quality assessment metric[J]. Computers & Electrical Engineering, 2018, 70: 904-913.
[42] JIANG Q, GU Y, LI C, et al. Underwater image enhancement quality evaluation: benchmark dataset and objective metric[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2022: 5959-5974.
[43] ISLAM M J, EDGE C, XIAO Y, et al. Semantic segmentation of underwater imagery: dataset and benchmark[C]// IEEE International Conference on Intelligence Robots and Systems. NJ: IEEE, 2020:1769-1776.


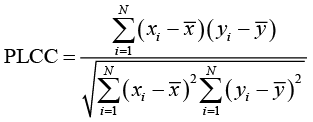 (1.1)
(1.1) 和
和 分别表示第
分别表示第 张图像的客观预测分数和MOS,
张图像的客观预测分数和MOS, 和
和 分别表示所有
分别表示所有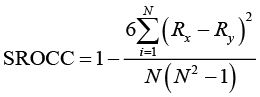 (1.2)
(1.2) 和
和 分别表示第
分别表示第 张图像的客观预测分数和MOS在数组
张图像的客观预测分数和MOS在数组 、
、 分别按从大到小排序后在数组中的位置。SROCC越大,说明质量评价算法的性能越优异。
分别按从大到小排序后在数组中的位置。SROCC越大,说明质量评价算法的性能越优异。 (1.3)
(1.3) 表示数据集中一致对(指变量大小顺序相同的两个样本观测值,即
表示数据集中一致对(指变量大小顺序相同的两个样本观测值,即 表示数据集中不一致对的个数。KROCC越大,说明质量评价算法的性能越优异。
表示数据集中不一致对的个数。KROCC越大,说明质量评价算法的性能越优异。 (1.4)
(1.4)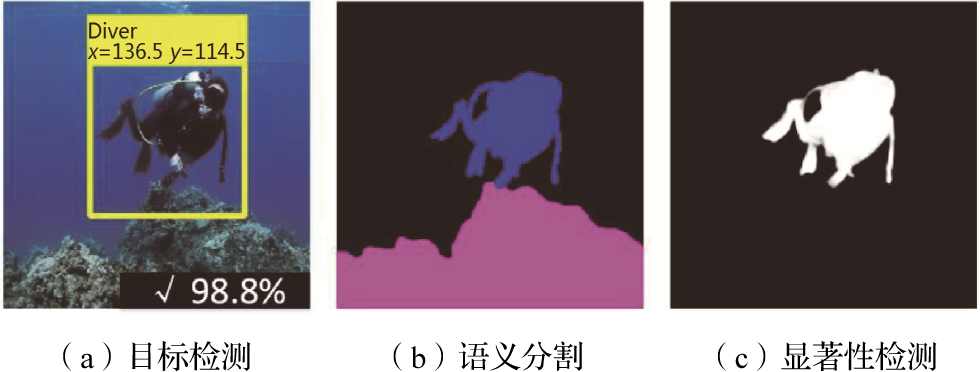
 (1.5)
(1.5) 和
和 分别为样本框面积和检测框面积。
分别为样本框面积和检测框面积。 (1.6)
(1.6) )和召回率(
)和召回率( )为
)为 (1.7)
(1.7) (1.8)
(1.8) )是PRC下的面积,其表达式为
)是PRC下的面积,其表达式为 (1.9)
(1.9) 表示当IoU阈值为0.5时,所有分类的平均
表示当IoU阈值为0.5时,所有分类的平均 ,其表达式为
,其表达式为 (1.10)
(1.10) (1.11)
(1.11) 是在每张图像中检测到固定数量框的最大召回率,平均值是根据IoU和类别计算的。
是在每张图像中检测到固定数量框的最大召回率,平均值是根据IoU和类别计算的。 (1.12)
(1.12) 是样本
是样本 和最近检测框之间的IoU,N是自定义的最大检测数量。
和最近检测框之间的IoU,N是自定义的最大检测数量。 (1.13)
(1.13) (1.14)
(1.14) )和F值(
)和F值( )也是常用的评价指标。
)也是常用的评价指标。 (1.15)
(1.15) 通常取0.3。
通常取0.3。